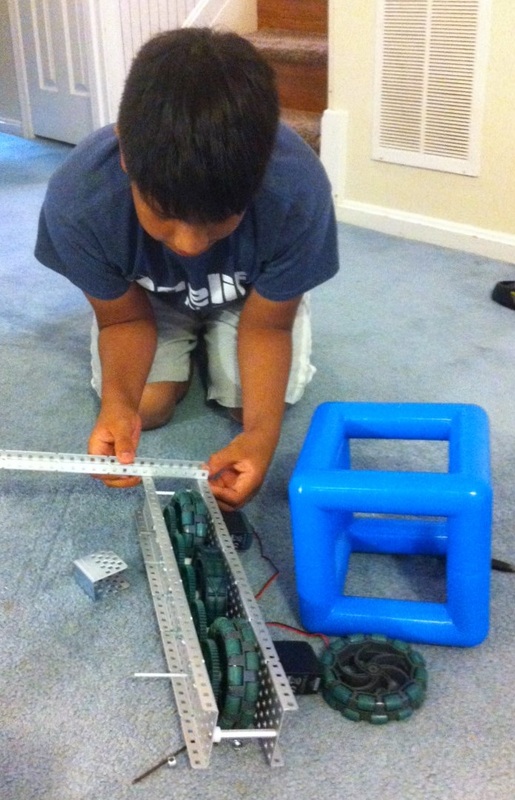
Our team meeting brought more progress on our three robots. One team continued to work on their X-drive omni wheel chassis. They hadn't put all the screws in the gussets which support the angles on the chassis. It was hard, slow work to get those last screws in, but if they didn't put them in, the wheels would not have been in an X shape and it wouldn't have worked properly.

Our other team building a chassis with the same design continued working to stabilize the chassis and also working on powering the linear life.
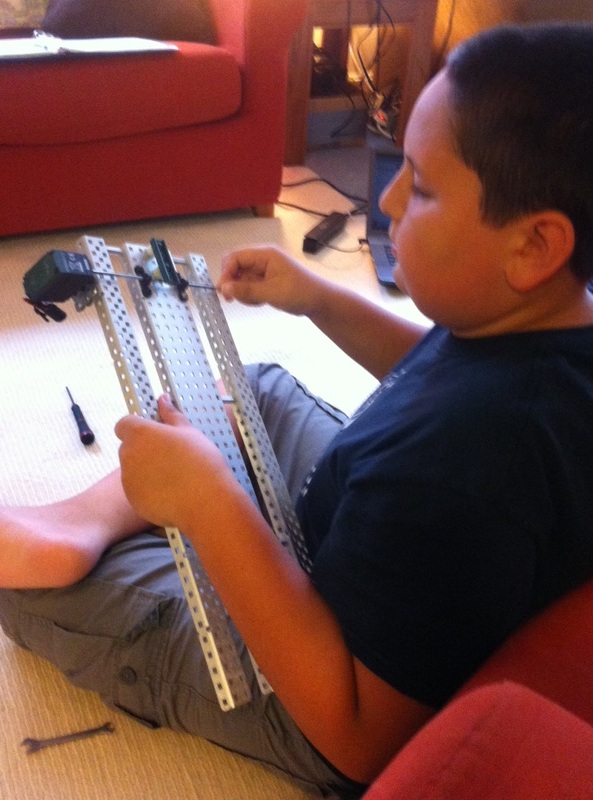

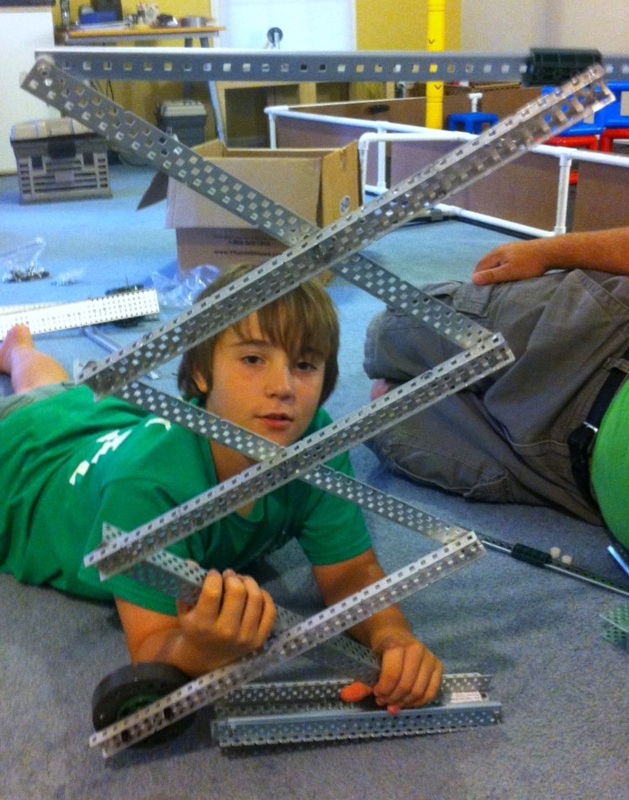
The team building the scissor lift robot worked to get the spacing of the wheels and gears on the chassis just right, and also worked on completing on side of the scissor lift. One motor was installed in the turntable used to power the scissor lift, and it was not able to lift. Elastic bands and another motor are the suggested solutions to that problem.
 RSS Feed
RSS Feed
