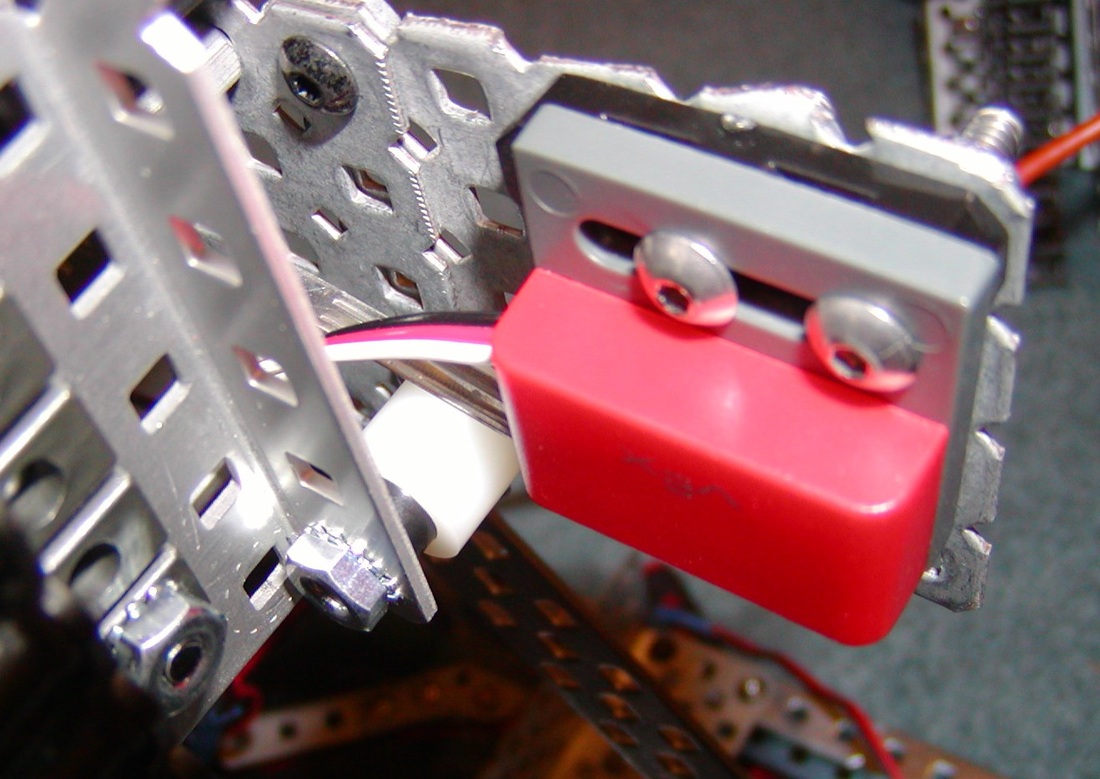
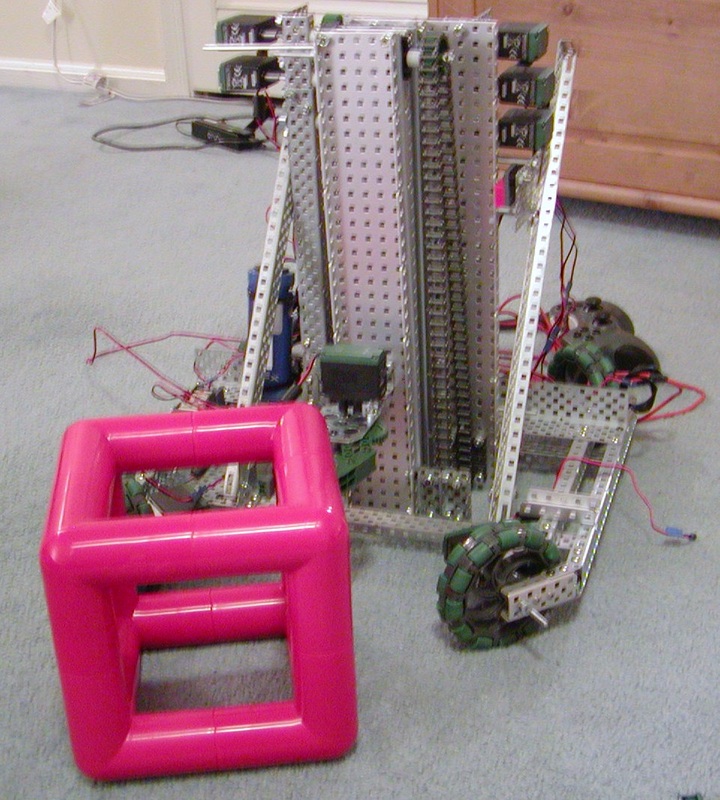
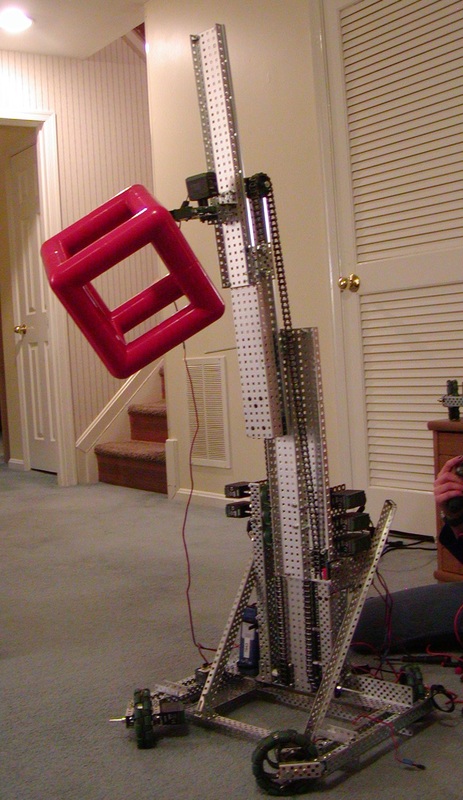
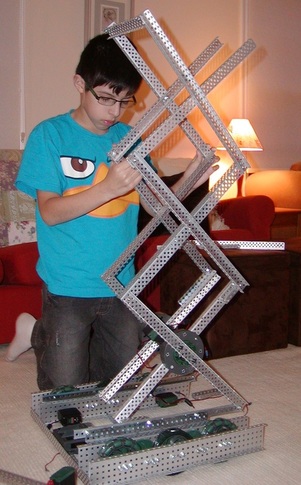
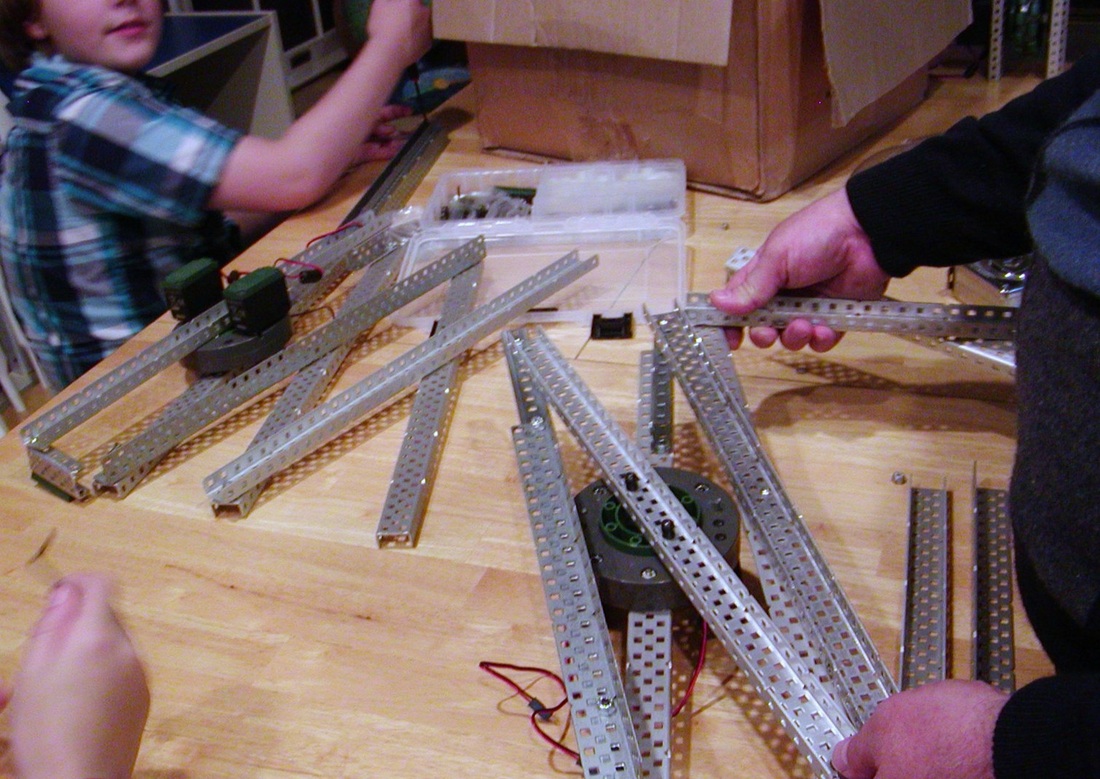
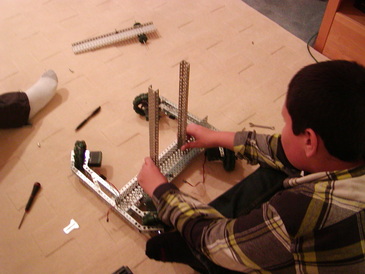
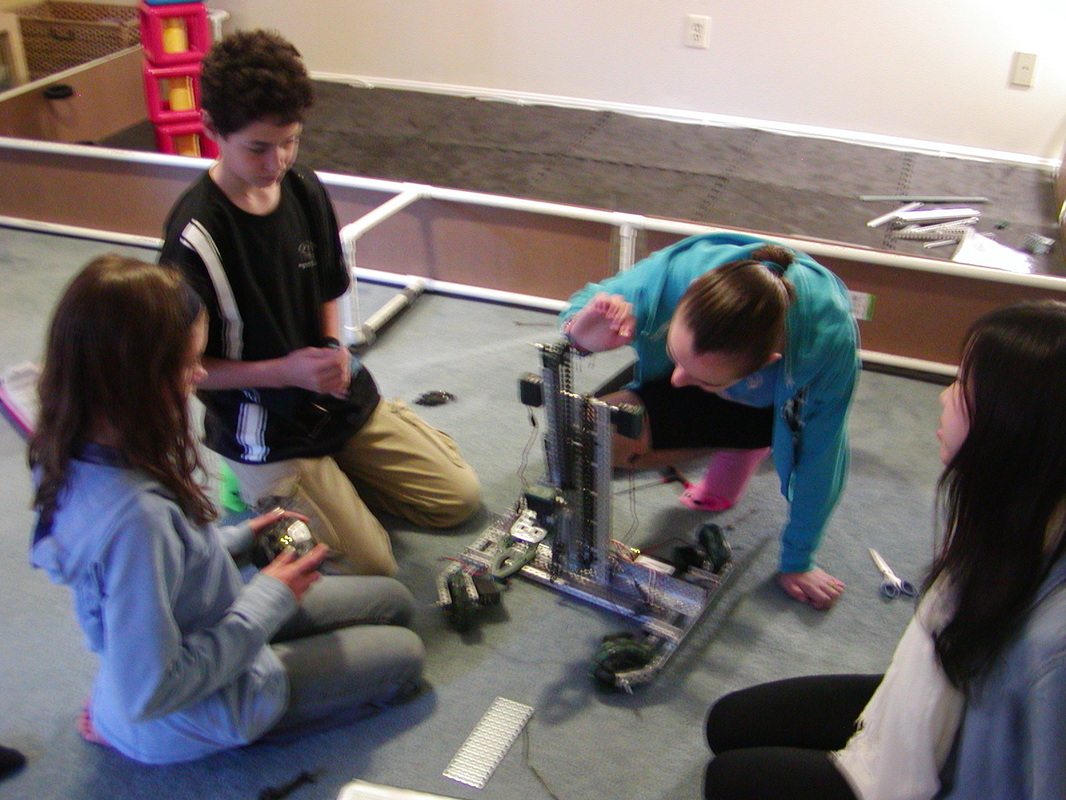
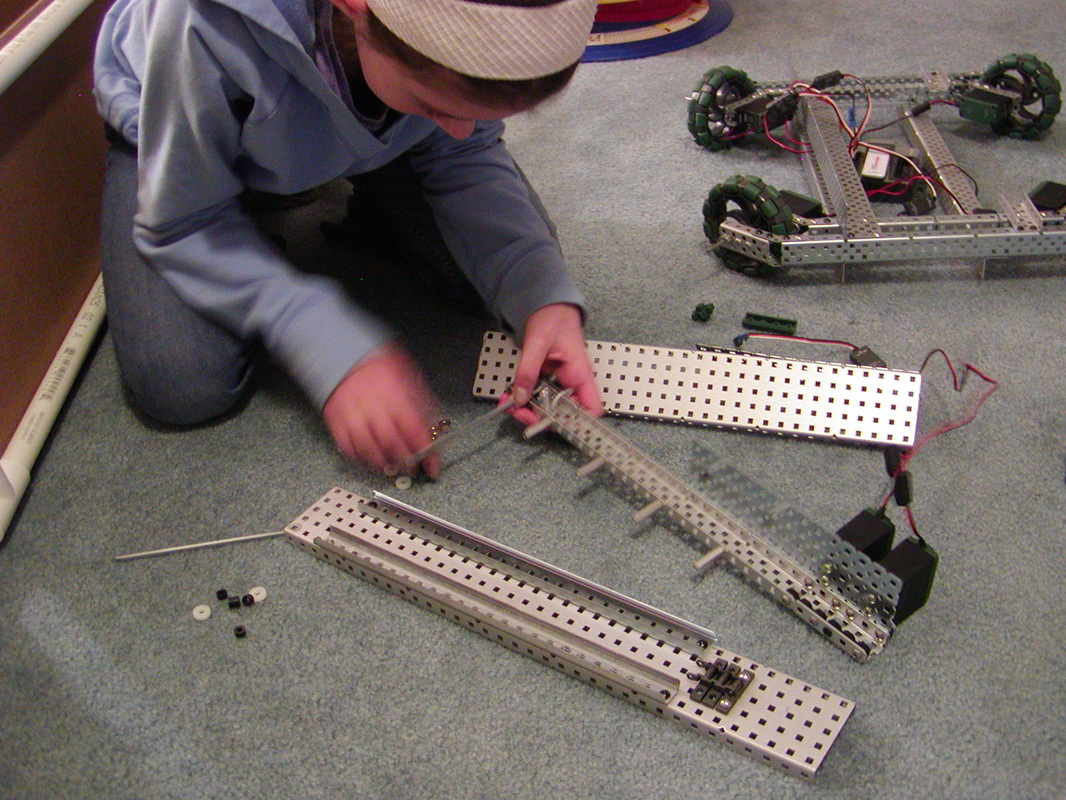
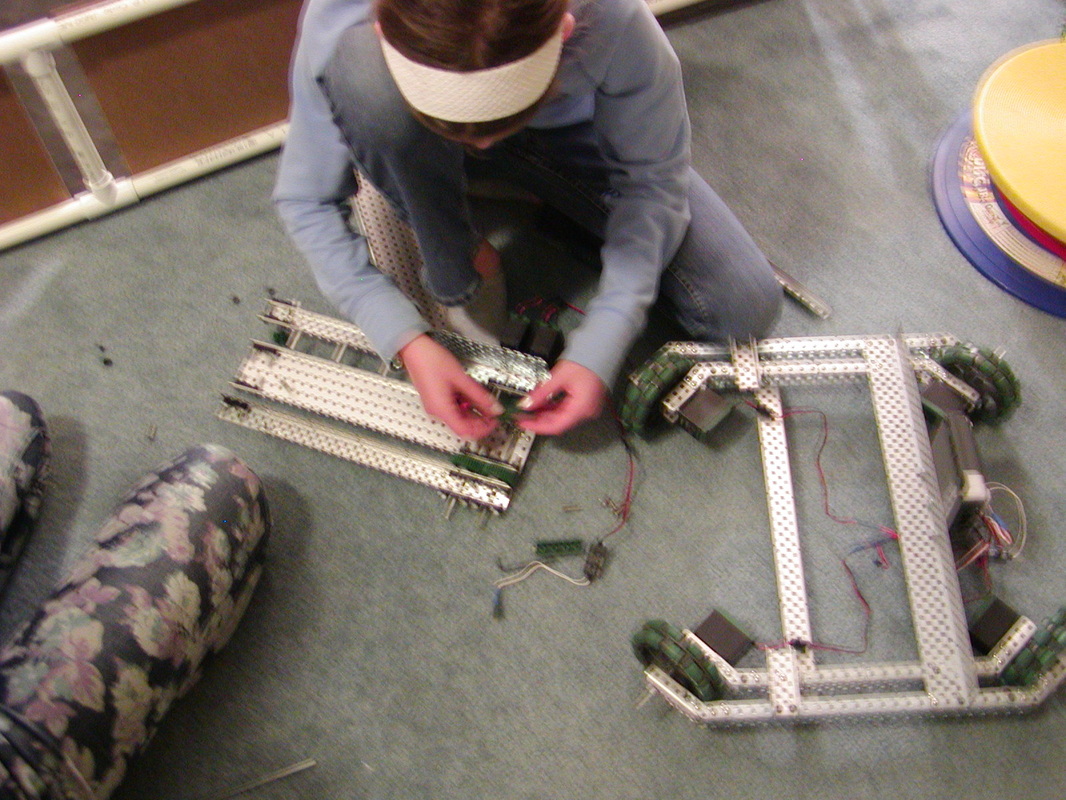
One of our teams has a member who is moving away in December, so they decided to work very hard to have a working linear lift robot in time for a competition on December 6th. Their cascading lift works well and they installed a limit switch to control how high the arm raises.



 RSS Feed
RSS Feed
