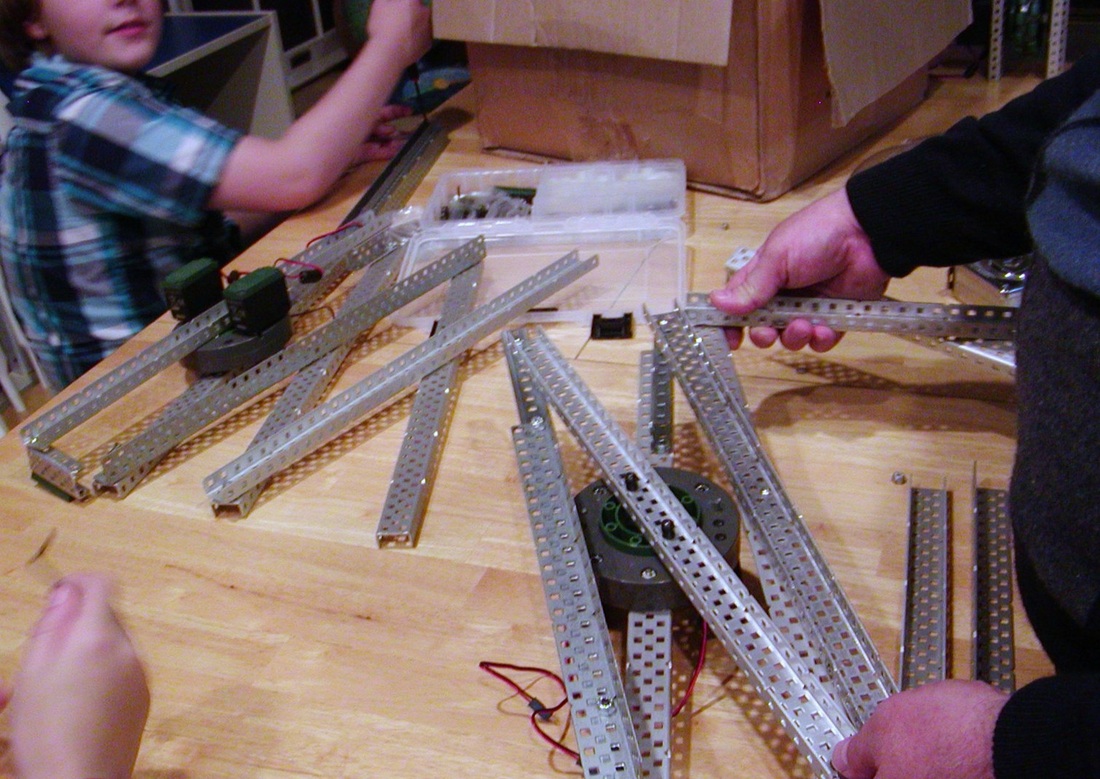
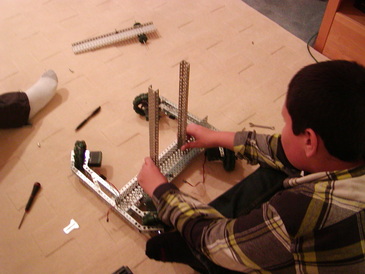
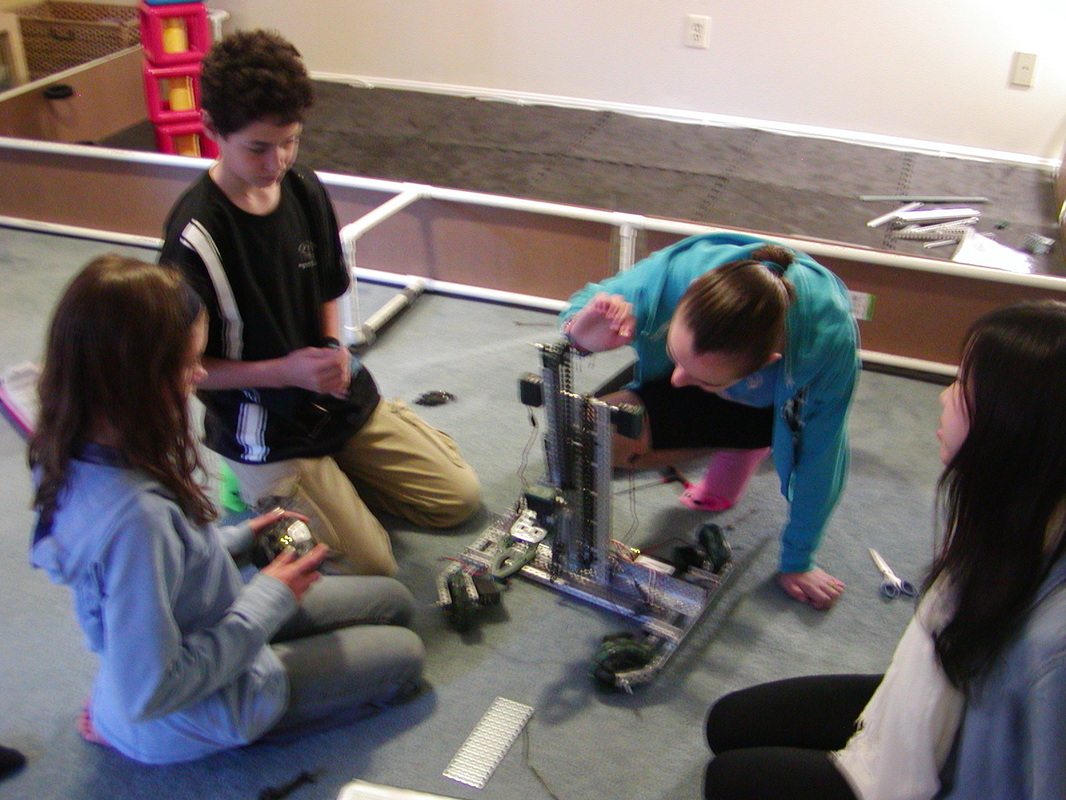
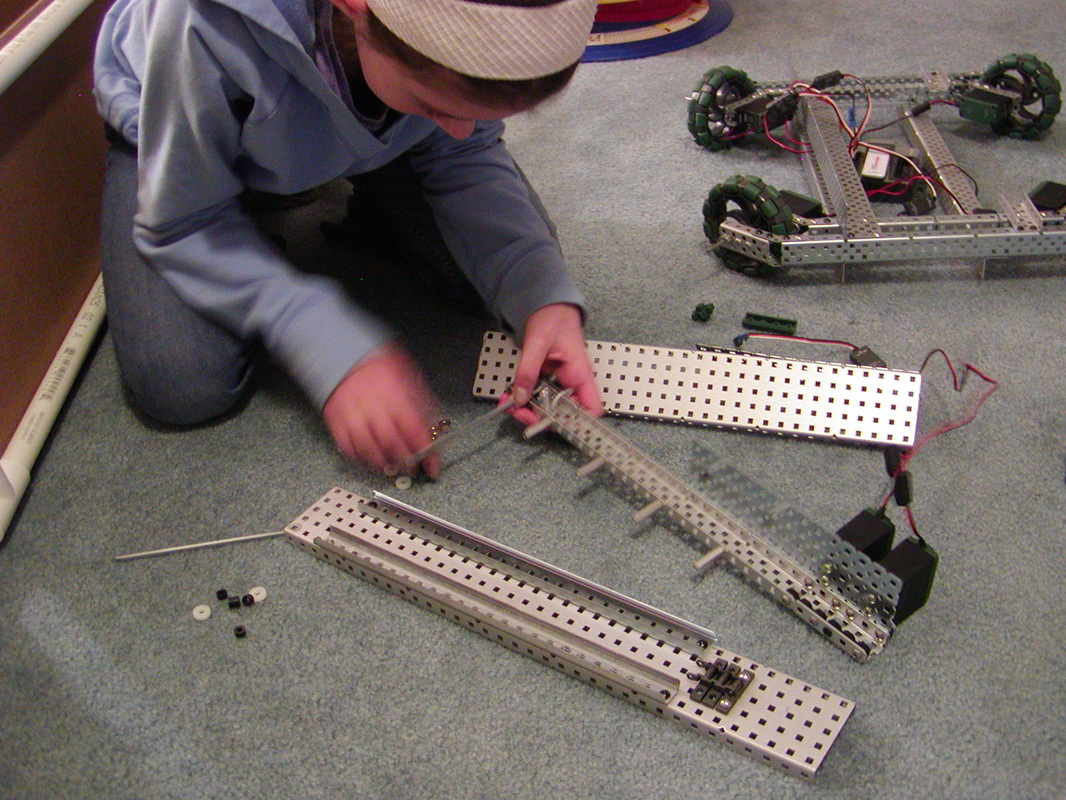
Today we are trying to make a machine that doesn't use Programming instead we are using simple machines. Advanced machines are innovations of simple machines (levers, wedges, pulleys, etc.). Our objectives are to make the marble(s) go down the wall that has simple machines that the marble activates or effects the marble to pop balloons!
































 RSS Feed
RSS Feed
